爱吱声
标题:
垂直起落之路上的匪夷所思(五)
[打印本页]
作者:
晨枫
时间:
2024-10-30 05:11
标题:
垂直起落之路上的匪夷所思(五)
本帖最后由 晨枫 于 2024-10-29 19:46 编辑
9 E) L' n" Z5 [& u8 K7 x
8 _0 K$ e4 G; G/ {* k' i
还有一些比较特别的设计,不大好归类,统统放到这里。
8 B" h, t$ b* W( {9 _( I2 c" P
1 t! c/ b l' R
7 Q8 ]" N, Q. d) s5 {3 k$ T# H! o8 M
贝尔X-22采用“四立柱”的涵道风扇
_. F/ Y' {: i) s; J' ` h
8 B2 y$ D1 _' d" m
贝尔在直升机世界里是巨头,从一开始就在垂直起落方面深耕,1966年首飞的X-22曾经是很有潜力的方案。
+ e4 A, ]: d3 e( m6 n
& z9 R9 n7 j8 i% P$ m0 [
这显然是现代多旋翼无人机的先驱,而且采用涵道风扇。
( j9 q. n; ?, H' w; e& U6 R. `& Z
" H2 h& y3 l2 @/ d3 R
四个涵道风扇显然对应于“四立柱”,由于采用四台分别的发动机,横距和纵距问题都容易解决。当然,代价是交联驱动轴,前后、左右涵道风扇都用同步轴联动,每台发动机都能提供30%的额外功率,所以任一发动机故障的话,其余发动机可以接过,保证安全。当然,这样的同步轴意味着重量、机械复杂性和功率损耗。
1 ~$ B* P2 d7 E( h% A" I
C; ]( G1 G7 O% r6 I
现在多旋翼无人机不再用同步轴,主要是因为无人机没有那么高的安全性要求。不同步只是飞行时有点摇摇晃晃,无大碍。但换成载人的话,这点摇摇晃晃就不只是不舒适的问题,可能飞行员直接被晃晕了,没法安全操纵。最不济,一台电动机故障,无人机失控,摔了自认倒霉,但没有太大的问题。多旋翼如果推广到载人,要么极大增加旋翼-电动机数量,八旋翼起跳,甚至更多,要么也采用机械的同步轴,那分布式电动驱动的优点就抵消了。
2 a- _( J" q8 X$ U
y4 C/ m% E9 {! V( ]
对于X-22来说,涵道风扇也是领先时代的。
8 |: G8 b' _. d, f$ ^3 j% W. p' ]
1 Y7 f8 J( J. b( b1 X: R3 F/ g
与开放旋翼相比,涵道风扇的推进效率更高。旋翼翼尖和机翼翼尖一样,有翼尖涡流损失损失。对于机翼来说,下表面压力高,上表面压力低,这本来是产生升力的关键,但在翼尖处,气往低压流,气流会横着绕过来,向上表面流动,形成涡流。这部分能量既不产生升力,也不产生推力,所以是损失,等效为阻力。旋翼也一样,在翼尖有径向绕过来的涡流损失。说起来,这也是涡流环,但和一般说的速降中形成的涡流环不一样,不要混淆。
6 J% B4 R7 M4 J4 E% @+ i, g7 l0 a
3 u6 t2 Z8 M2 z( j6 W5 t. s
要降低翼尖损失,飞机用翼梢小翼,旋翼就用涵道。翼梢小翼增加重量和阻力,使用与否是个权衡问题。涵道的重量和阻力可是大得多了。一般说来,只有在旋翼直径无法加大而升力或者推力还是不够的时候,才采用涵道。在飞机上,在船上,都是这样。涵道壁还有阻隔噪声的作用,但这是次要的。
0 V4 L2 y# F, N2 w1 ?
* a& g- y2 v& ]* }2 P
在X-22上,降低旋翼直径正是采用涵道风扇的原因,否则就大而无当了。更重要的是,涵道风扇转过来,从升力风扇转变为推进风扇的时候,涵道本身起环形翼的作用,增加升力。
, L2 T4 @$ y4 j- P$ @7 `1 ^
7 s) ] j3 l7 [
不过X-22最后还是因为性能达不到要求,尤其是垂直起飞重量,而速度没有比直升机高多少,下马了。本来这是美国陆军“空中吉普”的候选。
+ O$ J% V$ t8 U0 [* \+ Q
$ |$ [5 @1 p* }' _
无数垂直起落设计或者构想中采用涵道风扇,最后都是栽在重量和阻力上,还有同步轴。
0 ^2 D- L. X- m8 t |9 b
0 G" T' C" Y& o& Q: d
另一方面,现在人们对倾转旋翼已经熟悉,实际上还有倾转机翼。发动机和旋翼相对于机翼是固定的,但整个机翼一起倾转。
# F& }; \" I! Y1 [' D; K
% g m: @$ W1 s U% [0 z
6 h' l$ x; E) V' o+ v- U
LTV XC-142差点投产了
% u& D T% w. h7 U
f& m0 g0 \$ D( X, {7 y0 c; f: P
5 Y0 a1 T5 G& O& A& E/ }+ m9 o4 B# P
在无人机时代,倾转机翼重新流行起来,因为只需要一套倾转机构
5 u5 O# ~8 _+ [" H
& }3 @" ?: [# _" f7 o
- Q! |+ @- e1 M W
采用分布式多旋翼的话,尤其适合倾转机翼
- }, v! c0 v% P1 D% s/ D
% P5 o- f1 G7 F% x; V2 U8 l
倾转机翼和倾转旋翼的特点相近,实际上更加适合垂直起落和悬停,因为“下洗阻力”小。但在短距起落状态,接近竖立的机翼像门板一样,阻力极大,而且容易失速。不过在无人机时代,倾转机翼反而比倾转旋翼更加简单:只有一个倾转机构,而不像倾转旋翼,每一个旋翼都需要一个倾转机构。
6 T" ]8 L' v; R: N9 P
1 Q w$ y/ Z, S
对于分布式推进来说,倾转机翼尤其适合。分布式推进将推进力沿翼展均匀分布,使得推进气流不再集中在少数几个推进器(螺旋桨或者喷气口)附近,大大改善整个机翼的升力效率和受力分布。这要是也用倾转旋翼的话,沿着机翼翼展需要很多倾转机构不说,还需要很多开口,影响结构强度和重量。倾转机翼就省事多了,只需要在机翼-机体结合部一套倾转机构就成。
' ]5 A$ [7 d" }- d2 n& w5 A _4 X
2 R& I: i/ ^, V/ b# b$ e" \! X
1 b& J( k+ M: i0 I
引射(ejection)利用文丘里管的远离,用少量高压流体的高速流动在喉部产生负压,抽动大量低压流体,极大增加流体总流量,增加推力
6 e& c# C; `' [6 L) }7 C
4 q1 T8 @( w( l+ G
: g5 f! t) [% L
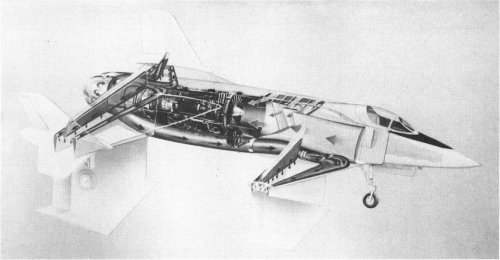
罗克韦尔XFV-12基于引射原理,用发动喷流拉动环境空气,产生增升
4 x# a& s* h- j8 p- |' F, x
) `! ?2 N @0 V& e6 F7 p7 h4 t
( C1 e7 _* m5 B+ m# }9 ? b: r' o
在原理验证时,效果很鼓舞,但到了实际飞机研制出来、开始试验的时候,发现引射增升根本达不到预期,对环境空气的条件太敏感,再增加引射口也无济于事
: O' x3 B( W# K+ I) Q
8 [" h% |- l/ p+ y
$ ^$ |3 R7 J8 P+ M2 ~- s
在陆地上使用的话,尘土、树叶被吸入,更是问题
3 b0 `8 ~4 {3 X/ G7 ~9 X
. D0 O& J1 S9 s4 q6 L! |, R
: {! H* d( m4 G: E& J3 x) J% ^
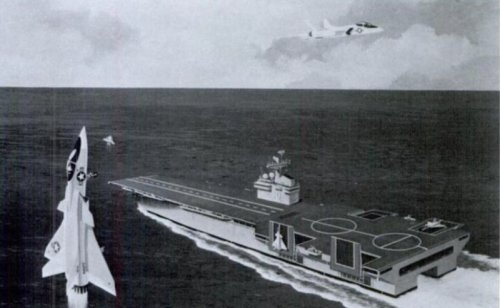
这本来要成为朱姆沃尔特的“制海舰”的舰载战斗机,这下黄了
' O6 L. I: G; t8 w
/ Y& T, i( D/ Z- G: f8 P/ t5 d
. t) v- {# S3 |! p
洛克希德XV-4也用引射增升,以差不多的理由下马了
: v6 c6 n8 n8 y
3 ~. A- E1 V1 v. O; `" E4 i
但是美国海军还没有放弃制海舰的想法,在80年代战斗机推重比已经超过1的时代,试图用类似直立起飞的办法,用“起竖式舷侧平台”作为发射架,让战斗机靠自己的动力直接升空,降落还是需要拦阻索。但起飞准备时间很长,起飞重量和垂直起飞一样,很受限制。战斗机推重比超过1.0是指在正常起飞重量下。海上出动尤其强调航程和载弹量,需要以最大起飞重量起飞,还是不行。
. [ i& O# v! j5 x7 V' [* i* P
3 W. w( z' A# _8 E6 q; H3 V
9 q! h; f( g4 ~: ?* d6 N7 L
紧接着美国海军推出直立起飞、拦阻索降落的思路
9 i z( u9 r* ~
- ]* ~- O5 a9 c+ j: ?9 ^! W
另一个思路是“天钩”。
/ n2 \, T2 f. R% {, }' e* c" o
: l8 x( Z" y9 _! y9 z
在“鹞”式初步上舰的时候,人们以为可以像直升机一样运作,只要直升机甲板面积够用就行。后来发现,临时用用可以,常年出动不行。甲板摇晃、喷流烧灼都是问题。这也是“阿波罗”和“联盟”号在轨道上对接的时代,于是有设想用起重机将“鹞”式吊到舷侧海面上空,再发动机点火。这就没有喷流烧灼问题;起重机吊臂也可以在空中三轴稳定,相对于飞机的位置反而稳定。飞机产生足够升力后,起重机脱钩,飞机飞走。
& w, q1 h7 W! _' h8 Z5 d% k
7 r4 B: b3 @3 c& k- y( M! D& O
回收时反过来,飞机首先与起重机吊钩对接,然后发动机关机,起重机把飞机吊回甲板。
5 b% t2 A4 B. X P
- K9 W+ j$ j6 V1 S. U1 l, C% i5 k# S9 z: ?
1 e2 Y( S8 R- P7 D/ T Q
天钩将“鹞”式的垂直起落吊离甲板,消除对舰船的影响
2 L' {( F, \; i% T1 o# w& B
2 y" m4 Q u6 T
0 u3 x. {& p# a& @+ P4 m! D. m
预期4000吨以上的驱逐舰就能改装,实际上7000吨以上更好,极大增加海上航空力量的建设成本和部署灵活性
$ Z Z2 ]5 Y) e
, i+ K6 p/ A w+ A9 x2 C
: W7 a( C/ Q9 H- o4 R
这是真的试验过的
5 z4 C1 V# E. \
' v Q$ b2 e5 Q8 a
但“天钩”最后放弃了。对接是高难度的,偶尔为之可以,不宜作为日常运作。垂直起飞、着陆和悬停对重量的限制还是绕不过去,还是老老实实走STOVL航母的路。
作者:
五月
时间:
2024-10-30 09:00
) t2 m4 s, f0 w& Q
都怪讨厌的重力。
8 }; H4 e9 Q1 }- i
+ |8 _( Y! D2 i0 t9 v" _' u
欢迎光临 爱吱声 (http://129.226.69.186/bbs/)
Powered by Discuz! X3.2

 6 h' l$ x; E) V' o+ v- U
6 h' l$ x; E) V' o+ v- U
 - Q! |+ @- e1 M W
- Q! |+ @- e1 M W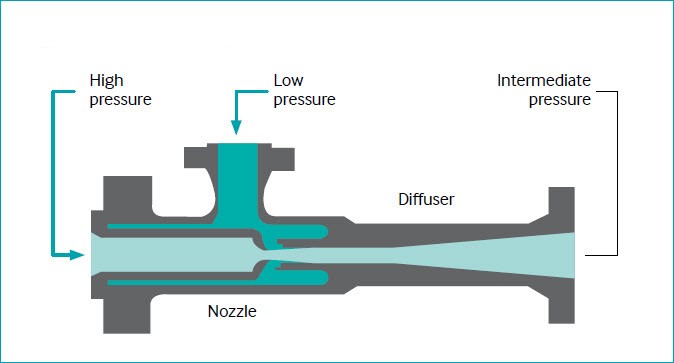


 $ ^$ |3 R7 J8 P+ M2 ~- s
$ ^$ |3 R7 J8 P+ M2 ~- s : {! H* d( m4 G: E& J3 x) J% ^
: {! H* d( m4 G: E& J3 x) J% ^
 1 e2 Y( S8 R- P7 D/ T Q
1 e2 Y( S8 R- P7 D/ T Q

